
URDF
What is the Unified Robotics Description Format (URDF)?
The unified robotics description format (URDF) is an extensible markup language (XML) file type that includes the physical description of a robot. It is essentially a 3-D model with information around joints, motors, mass, etc. The files are then run through the Robot Operating System (ROS). The data from the file informs the human operator what the robot looks like and is capable of before they begin operating the robot.
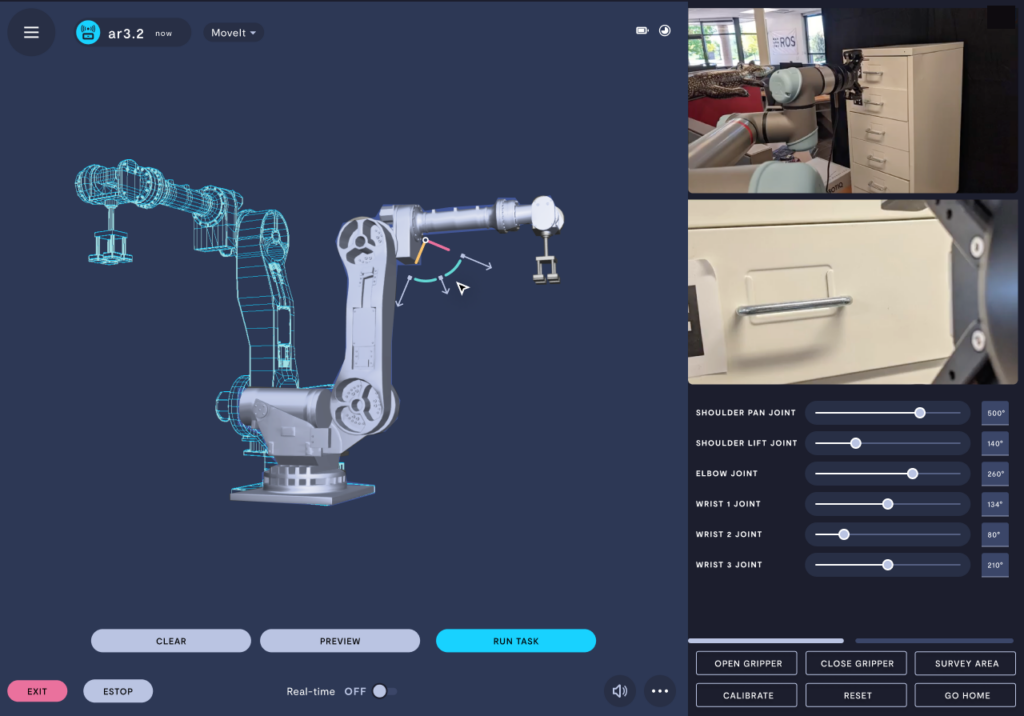
In the Formant platform, we ingest the file from the robot and create a real-time visualization, so an operator has context around what the robot is doing. Otherwise, they would solely depend on the point-of-view camera or a 3rd-person camera (which would be rare).
How is URDF used in robotics?
It provides the information a human operator needs to know to understand the physical shape and size of a robot and the robot’s capabilities. It plays a crucial role in the decision-making process of a company that is purchasing a robot or fleet of robots for their warehouse, farm, healthcare facility, etc.
These files are also used to in simulators to test robot behavior prior to real-world deployment, or in the creation of a digital double for real-time, two-way visualization of the state of a robotic device.
Many robotic manufacturers have URDF models of their devices available for download. These include the Segway RMP, Turtlebot, and AR10.
More Models:
Agility Robotics Digit
ANYbotics Anymal
Boston Dynamics Spot (via Clearpath ROS Driver)
Clearpath Jackal
Clearpath Dingo
Clearpath Husky
Clearpath Turtlebot
Unitree Go1
Universal Robotics
